
Previously, we have discussed the two halves of the governing inequality in structural engineering – demand as it relates to capacity. Now that we have the big picture before us, we can proceed to a more detailed look at the loads that concern the structural engineer.
In simple terms, we have two types of loads which act on a structure in different ways. The first is an external load. This type of loading, as its name implies, is applied externally to a structure. These loads are not induced loads; rather they either act on an object’s mass through Newton’s second law or apply a pressure to the structure itself. The most common form is gravity’s acceleration acting on an object’s mass, generating weight. Thus, the structure must support the weight of the object. Earthquake accelerations act on an object’s mass, creating lateral loads. Wind forms pressure on objects, creating wind loads.
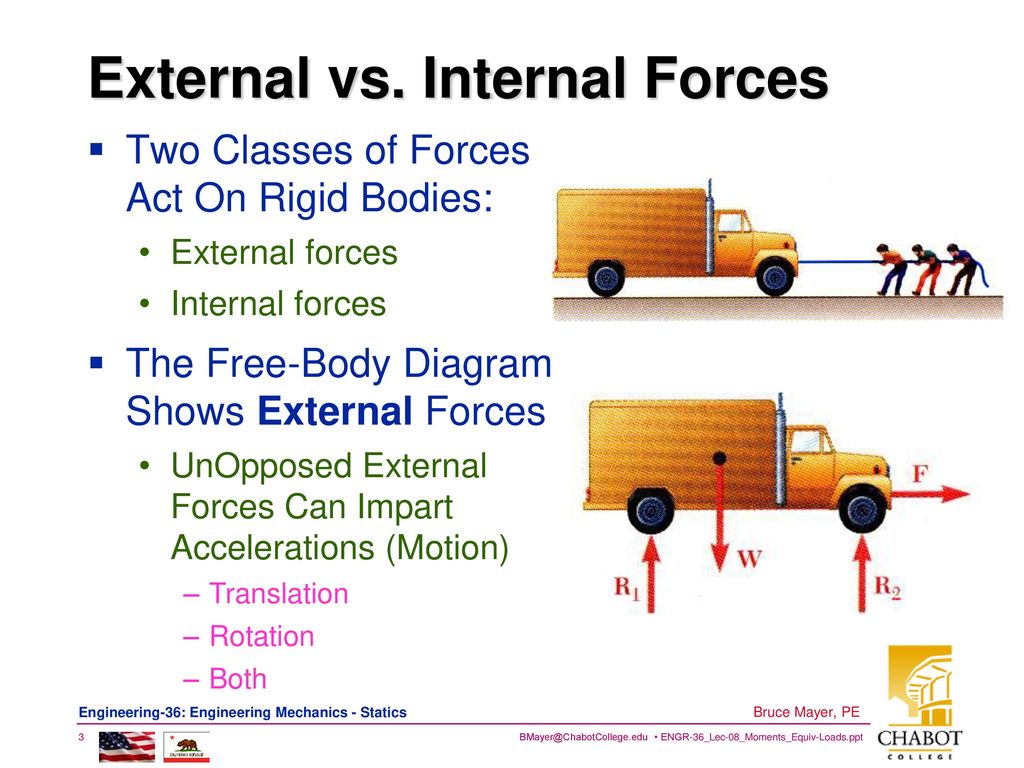
The second type of load is an internal load. Internal loads are induced loads caused by externally applied loads on the structure. These are of the most concern to the engineer and are what engineers deal with in their daily work. We will explore what internal loads are, how they are determined and what they represent.
Now, to say that external loads are not important to the engineer is not a true statement. While they are less important to the engineer, they still represent an important real world connection for the engineer’s work. To the layperson, it is important to know how much live load a floor of a pedestrian walkway can hold. To the engineer, they may be more interested in how much bending moment or shear a beam can take in that floor before it breaks. To both, they want to know the same thing – engineers just look at the problem from a different vantage point.
Luckily for us (maybe) the internal loads on an structural member are succinctly related by a simple mathematical relationship. I have to get a bit boring and technical here, but I’ll keep it brief. This relationship is governed by integral calculus. Much like the relationship between position, velocity, acceleration and jerk with respect to time in physics, in engineering we study the relationship between load, shear, flexure, rotation and displacement with respect to position.
The relationship is officially known as the Euler-Bernoulli Beam Equation. This equation covers beam behavior and while it was discovered for beams, it is generally understood that these principles relate to any structural member.
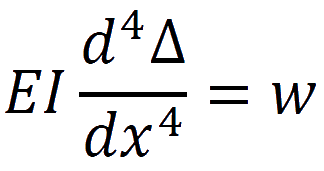
What does it say or how does it work? Well, it its most basic form the equation says that the fourth derivative of displacement multiplied by the beams stiffness characteristics is equivalent to the externally applied load on the member. So in a nutshell, we now know that the displacement or sag on a beam is related to the load applied to it. This seems easy enough to prove. But with some manipulation we gain even more valuable information from this profound relationship.
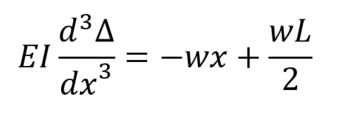
Now, if we find the integral of the load on the beam, we find the relationship for the shear on the beam. Shear is the tendancy for the beam to want to tear away from itself along a vertical plane. If we find the integral of the load formula, this will tell us the magnitude of the shear force at any point along the beam.
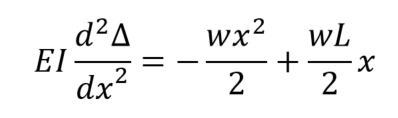
Let’s go one more step. Finding the integral of the shear formula gives us the relationship for the bending moment on the beam. Bending moment is also known as flexure. A moment is a sort of rotation. As a beam bends, it resolves itself into tension and compression forces of varying magnitudes in the fibers of the member. If we know the moment induced, engineers can figure out the internal force in the various fibers of the member.
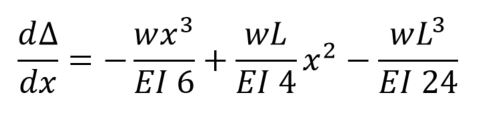
Yet another step, integrating the bending moment formula will give us the relationship for the slope or rotation of the beam. This aspect is not all that useful to engineers in general, however it is useful when trying to figure out how much rotation a bridge bearing may need to be designed to carry. Rotations of this kind are usually small and since rotation is also tied to the material properties of the member in question, the formula must be divided by the stiffness of the beam.
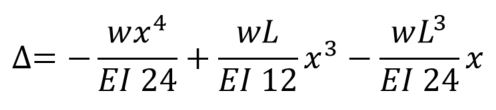
And the final step, integrating the rotation formula will give us the deflection of the beam. Deflection is important to the engineer because structures must not only be strong enough, they must be stiff enough. Deflection is usually computationally more difficult to calculate, especially by hand. Therefore, while important it is not typically readily available. Engineers use other approximate means to ensure proper stiffness in structures – usually by employing limiting span to depth ratios. Like rotations, deflection is greatly influenced by the member stiffness properties and the formula is divided by the stiffness of the beam.
Now that we have demonstrated the relationship between externally applied load and internal loads on a beam, we can further extract some key characteristics of beam behavior.
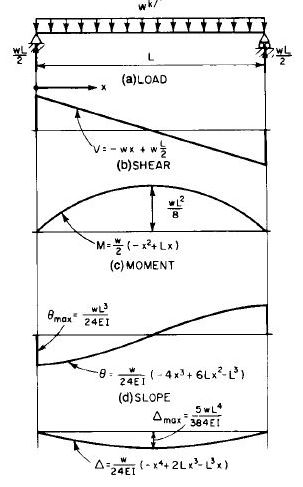
The derivative-integral relationship, known as the Fundamental Theorem of Calculus, has one curious feature that engineers often exploit to their advantage. Maximum bending moment in a beam occurs at a point where there is zero shear. It can also be said that the rotation or slope of a beam is zero at a point of maximum bending moment. Following this logic, it can further be said that the maximum deflection in a beam occurs at the point of maximum bending moment.
Another curious feature of the derivative-integral relationship is that the area under a function is given by its integral. Engineers use this trait as an idiot check since integration can get messy.
A word about boundary conditions. In a beam, there are generally three degrees of freedom. That is, three different ways a beam end can move. It could move vertically. It could move horizontally. It could rotate. Or it could do any combination of those three at the same time.
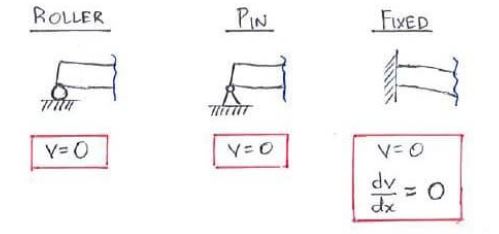
Now, when we analyze a beam, we usually have to state the boundary conditions. That means, which of the three degrees of freedom is fixed and which are free to move. A fixed boundary condition restricts all three. A pin condition allows rotation but restricts vertical and horizontal movement. A roller condition allows rotation and horizontal movement but restricts vertical movement.
In a simple beam, one end will be pinned while the other will be a roller. The more restrictive you make the boundary conditions, the more difficult the beam becomes to analyze. This is because the indeterminacy of the beam goes up, which leaves us with more unknowns to solve for than we have equations to solve them all. In this case, engineers have devised other means to calculate the behavior of a beam which is beyond the scope of this blog post.
Now that you know your boundary conditions, we have to look at what we are left with. One truth in engineering is that where you have restraint you have force. Where you have no restraint, you have displacement.
At a pin support, I will have a vertical reaction and a horizontal reaction and no displacement. I will also have some rotation but no moment.
At a fixed support, I will have a vertical force, a horizontal force and a moment. I will have no displacement or rotation.
One more truth regarding beams. Since structures do not generally move, that is they do not accelerate through space, then we must agree that per Newton’s Second Law of Motion the sum of the external forces acting on the beam must equal zero. This may not sound that profound, but it actually makes our lives that much easier. Structures must, at all times, be in a state of equilibrium.
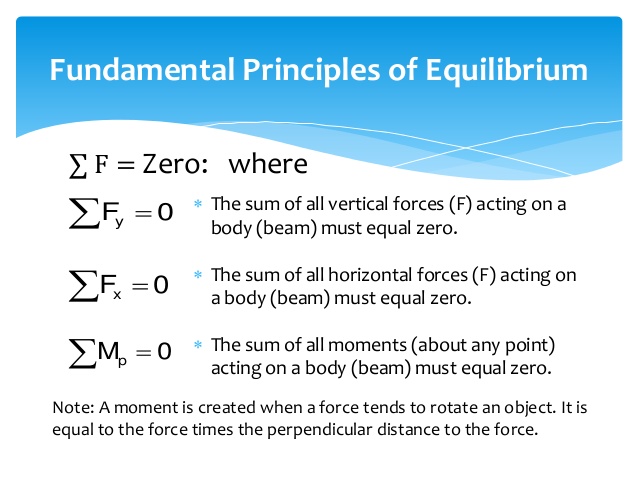
Since we have three degrees of freedom and three unknowns to solve for, we also have three equations we can use to solve for those unknowns. The sum of the vertical forces on a beam must equal zero. The sum of the horizontal forces acting on a beam must equal zero. And the sum of the moments acting on a beam must equal zero. Careful use of algebra using these statements means any determinate beam can be analyzed.
Structural analysis, at its heart, is simply taking the external loads of a structure and finding the internal forces. These internal forces are what the structure’s individual element must be designed to support. To do this, engineers must use equal parts mathematics and equal parts physics to solve such problems. Mathematicians may describe their world through the beautiful simplicity of math, while physicists may describe our complex world using physical truths, but engineers must take the two and merge them in order to create something – not just describe it.
Views: 2651





I always wondered how bridges could be designed to not fall down. Now I still don’t know, but I know someone who does. Great blog!
Were older bridges, medieval or Roman, say, simply overengineered, or copied from what had worked in the past?
A little of both. Of the world’s oldest bridges still in use, almost all of them use arches. Arches are an immensely strong structural form, known back to antiquity. They were used in both buildings and bridges. If it is working well, why change it?
Besides being tried and tested, why did the arch persist for millennia? It was well suited to the building materials on hand. Stone is strong in compression, as is concrete, which was known to the Romans but was lost for millennia. Arches remain entirely in compression under load, which makes both stone and concrete ideally suited for use in arches. It was not until the late 18th and 19th centuries that iron became common as a building material, which allowed other structural forms to be used such as trusses which include both compression and tension elements.
Were they overengineered? Probably but not deliberately. The strength of materials was not widely understood by engineers of the time. Instead, it is likely that good rules of thumb that were widely and commonly known were used in construction and with good results. Methods of construction and limited availability of other materials may also have led to conservative designs.